

Mechanical Structure
Mechanical Gripper
mini robotic arm
Gear and rack
gripper
Opening and Closing Mechanism

 mm layer, 2 walls, 15% infill
mm layer, 2 walls, 15% infill
2-disc
PETG/PLA
Designer

22

6
Robotic Gripper – Pushrod Claw
I. Inspiration
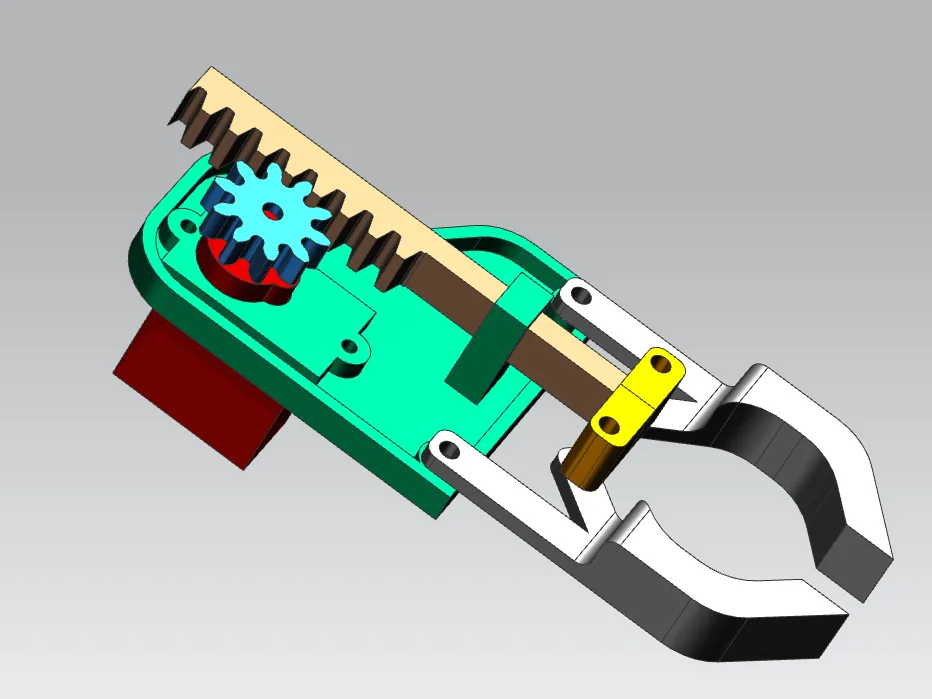
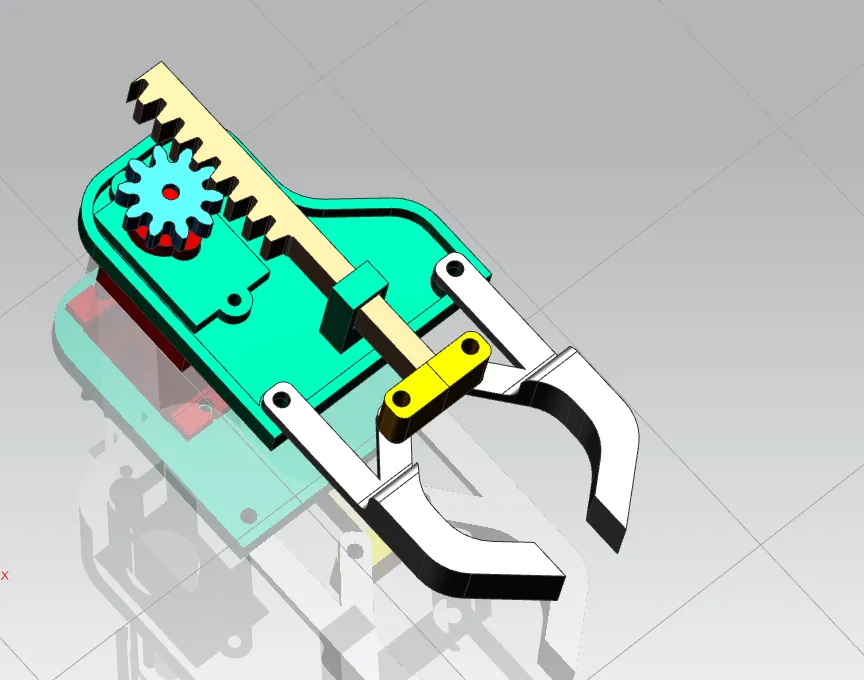
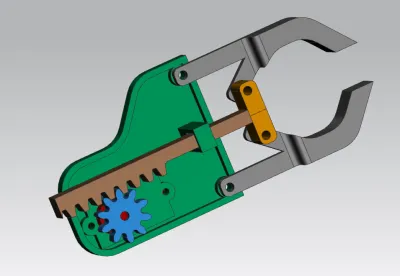
Based on a linear gear–rack transmission paired with a connecting‑rod pushrod mechanism, this design is compatible with the SG90 micro servo motor and serves as an end‑effector for small robotic arms. Its compact and streamlined structure makes it ideal for classroom demonstrations of mechanical transmission principles, as well as for direct use in robotics innovation projects.

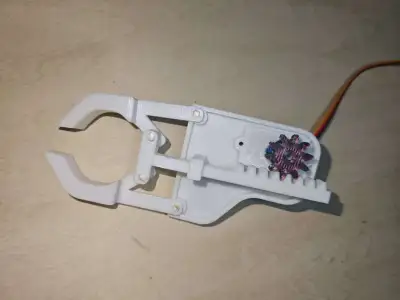
II. 3D Printing Process
The housing, gripper jaws, and pushrod are printed using PLA filament, while the gear and rack components are made from PETG to enhance wear resistance. A 0.3 mm clearance is left at the gear meshing points, and a 0.1 mm assembly allowance is provided in the connecting‑rod hinge holes. With no large overhanging surfaces and only minor local fillets supported by simple supports, the part exhibits low printing difficulty.
III. Structure and Assembly
The servo motor rotates the gear, driving the rack to produce linear reciprocating motion of the pushrod. A connecting rod synchronously actuates the opening and closing of both gripper jaws. The fully enclosed housing protects the transmission components from debris, while standard mounting holes at the rear allow for easy integration into various setups. The curved claw design ensures stable gripping of diverse small parts.

Originality of the Model
The author declares that this work is their personally original model
This model is licensed under the following terms:
Credit must be given to the creator
Models(2)
 机械爪6.10.3_1.stlDesigner
机械爪6.10.3_1.stlDesigner
1.33 MB

2026-06-10
- 机械爪6.10.3_1 2.3mf
332.31 KB
2026-06-12