




Mechanical
gripper
Spring‑powered toys
Spring Structure
Mechanical Gripper
mini robotic arm


2

3
Manual Mechanical Gripper with Spring
I. Design Inspiration
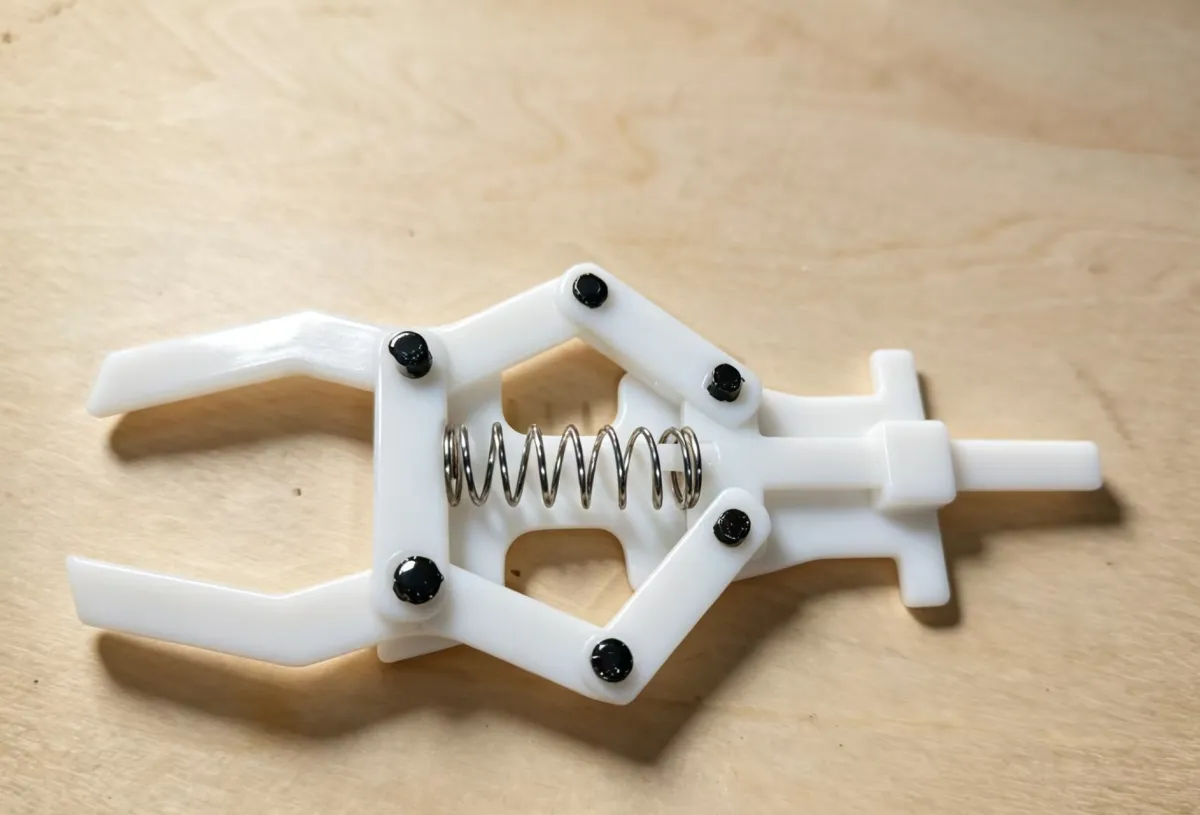
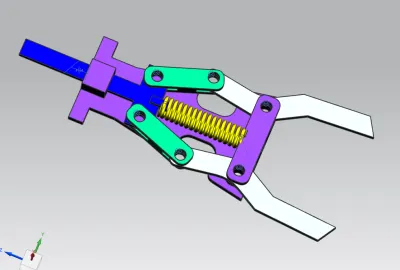
Based on the principle of a linkage-type mechanical gripper, this purely manual clamping device features a spring-return mechanism. Designed specifically for DIY mechanical models and small-scale grasping experiments, it requires no servo motor drive, boasts a simple and intuitive structure, and serves as a practical model for introducing mechanical transmission concepts and for educational purposes.
II. 3D Printing Process
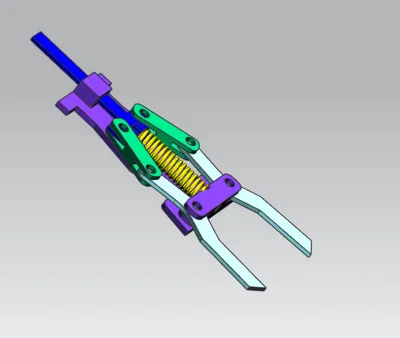
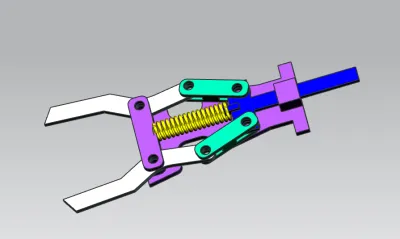
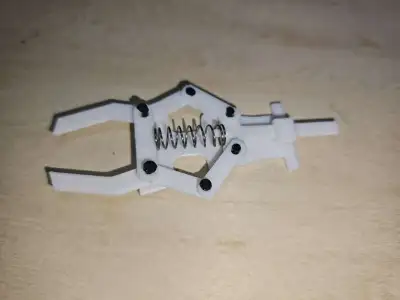
The entire assembly is printed using PLA filament, with no large overhanging curved surfaces. The hinge holes in the linkages are pre-drilled with a 0.1 mm clearance to ensure smooth assembly, while the wall thickness of each part is set at 2 mm. Standard screws can be used for assembly, allowing the parts to print successfully without additional supports.
III. Structure and Usage
A built-in spring provides automatic return, and by pushing or pulling the rear pushrod, the linkage mechanism opens and closes the gripper, making operation both simple and effortless. The gripper jaws are designed to accommodate small components, and it can be integrated with robotic arms or used independently as a manual fixture.

Originality of the Model
The author declares that this work is their personally original model
This model is licensed under the following terms:
Credit must be given to the creator
Models(1)
 机械夹爪,手动-带弹簧.stlDesigner
机械夹爪,手动-带弹簧.stlDesigner
1021.57 KB

2026-06-09