
mini robotic arm
Mechanical Gripper
gripper
Mechanical
Gear Transmission
Robot


2

2
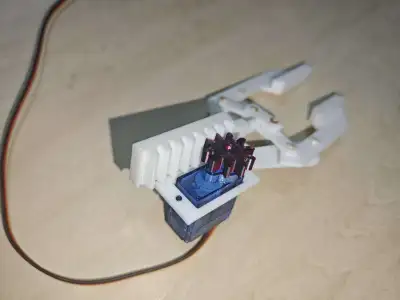
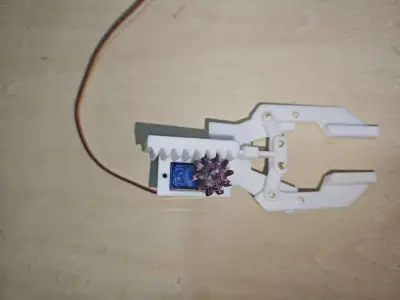
Robotic Gripper – Gear-Rack Pushrod Version
I. Inspiration
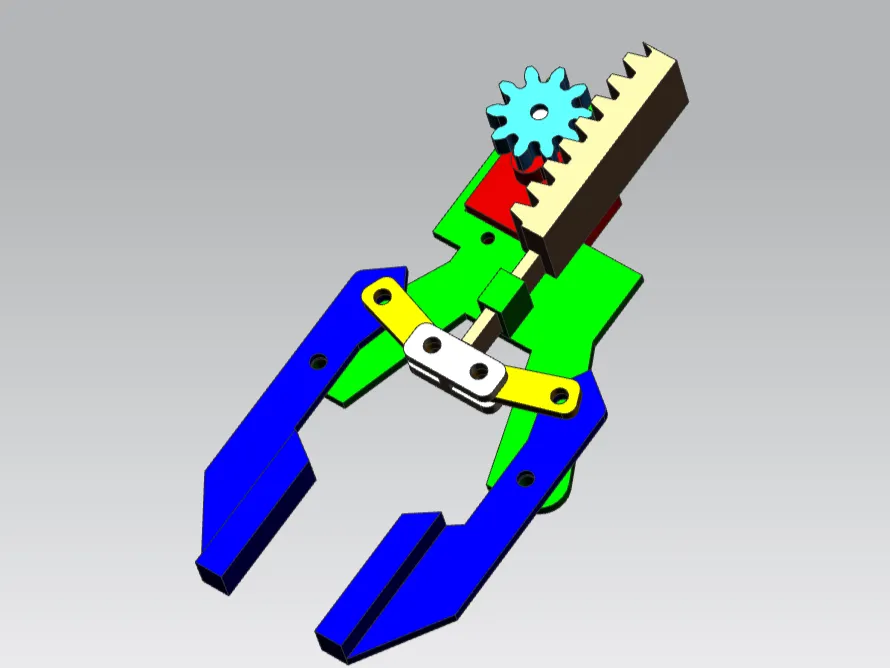
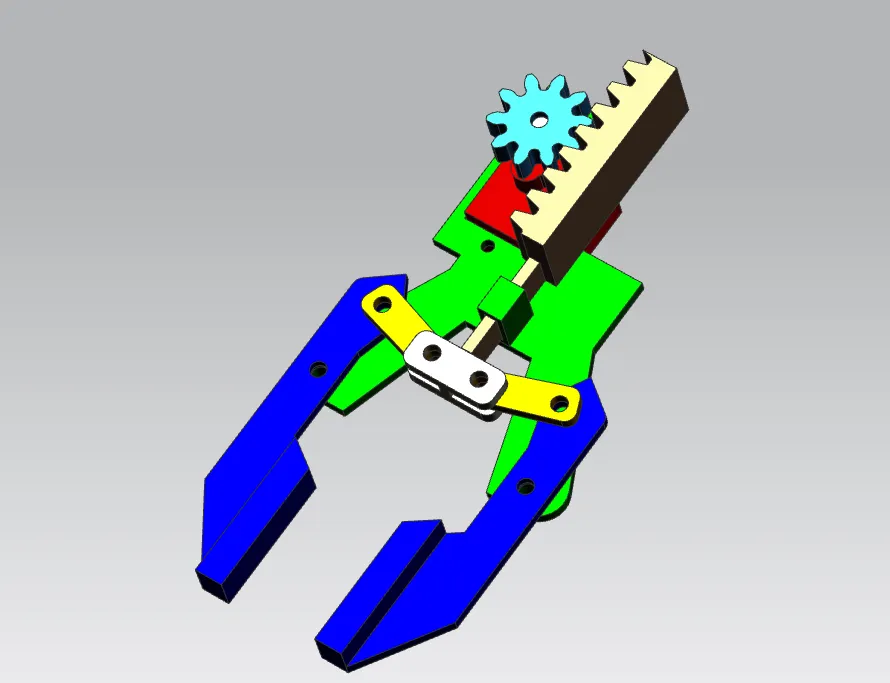
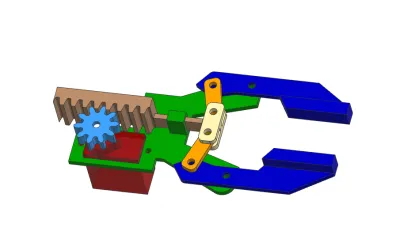
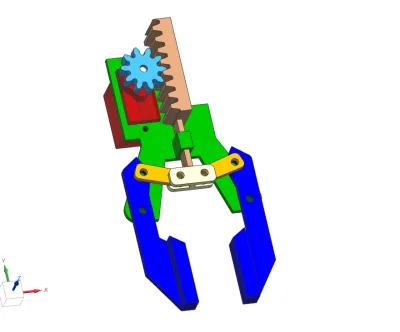
This design employs a composite transmission system combining a gear-rack mechanism with a connecting-rod pushrod, compatible with the SG90 micro servo motor. It is specifically engineered as an end-effector for small robotic arms, offering both a clear demonstration of the gear-rack transmission principle and practical functionality for grasping tasks in science-and‑technology‑oriented robotics.


II. 3D Printing Requirements
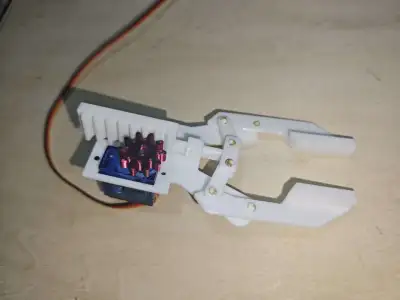
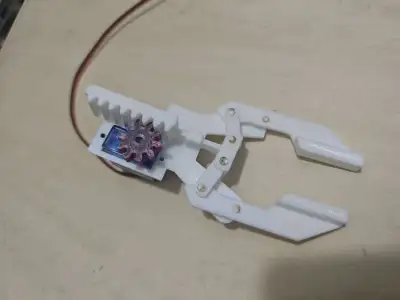
The main frame, gripper jaws, and pushrod are printed using PLA filament, while the gear-rack assembly is made from PETG to enhance wear resistance. A 0.3 mm meshing clearance is left between gear teeth, and a 0.1 mm fitting allowance is provided at hinge holes. The overall structure avoids large overhangs, minimizing the need for extensive support material during printing.
III. Structure and Assembly
The micro servo motor drives a pinion that moves a rack back and forth in a straight line. Two connecting rods synchronously pull the gripper jaws, enabling parallel opening and closing. The servo’s built-in locking compartment eliminates the need for additional fixation, and a standard mounting hole is reserved at the rear, ensuring stable gripping motion and compatibility with various small components.

Originality of the Model
The author declares that this work is their personally original model
This model is licensed under the following terms:
Credit must be given to the creator
Models(1)
 机械爪6.9.2.stlDesigner
机械爪6.9.2.stlDesigner
1.58 MB

2026-06-10