


gripper
Robot
End effector
Robotic Arm
Mechanical Gripper


15

3
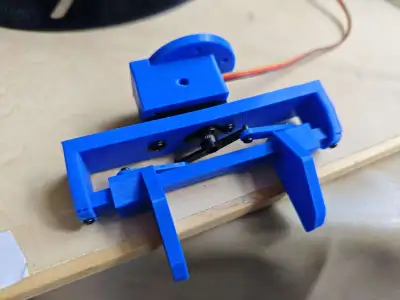
Robotic Arm End-Effector – Gripper
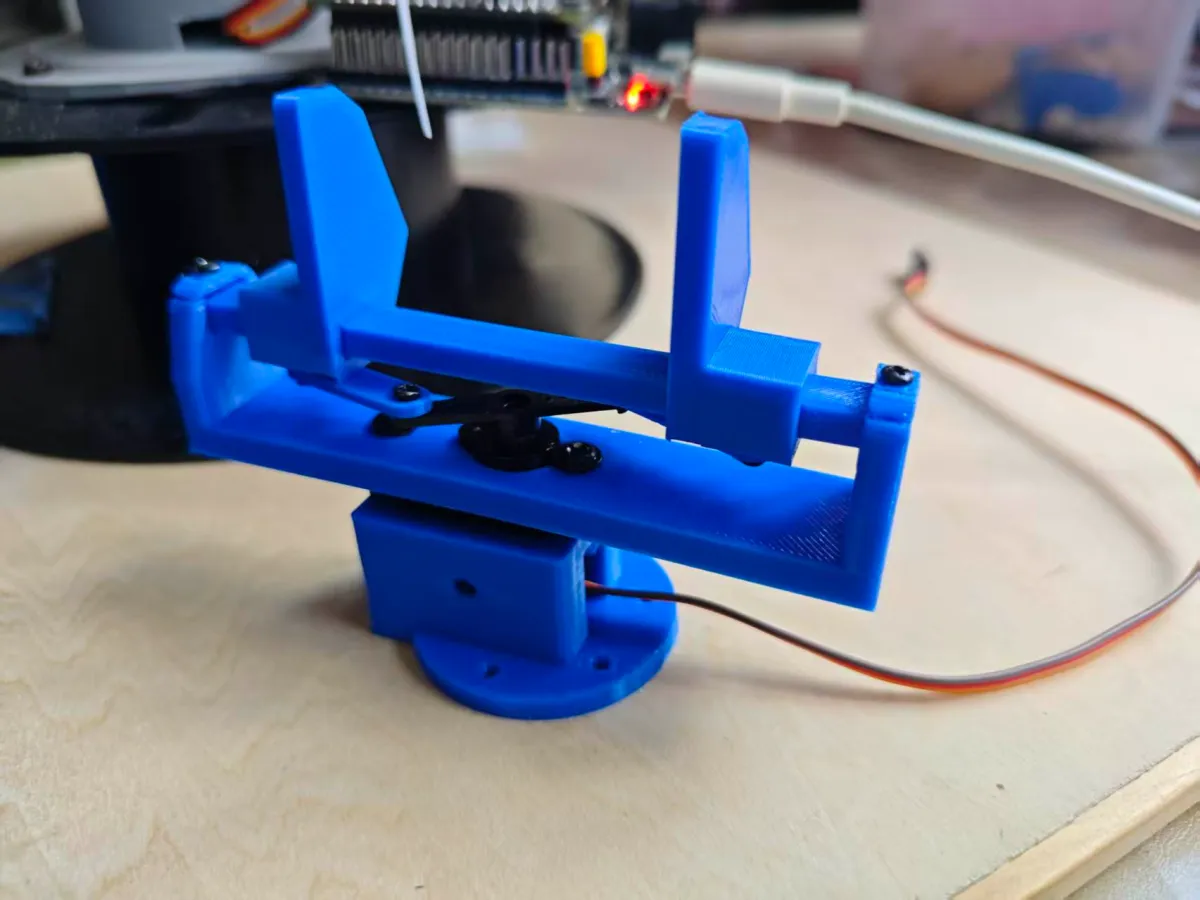
Linkage Transmission Design Based on the crank–connecting rod mechanism, a single MG90 micro servo drives the entire opening/closing assembly. As the servo rotates, it synchronously closes and opens both gripper jaws, resulting in a compact, streamlined design that achieves stable gripping with minimal components, making it ideal for mounting on small robotic arms.

3D-Printed Integrated Housing The entire gripper housing is fabricated as a single PLA component. The frame and claw body are precisely engineered to match assembly dimensions, with pre-drilled screw holes for secure fastening. This design ensures hassle-free assembly, keeps the overall weight low, and avoids imposing additional load on small servo-based gimbal mounts.
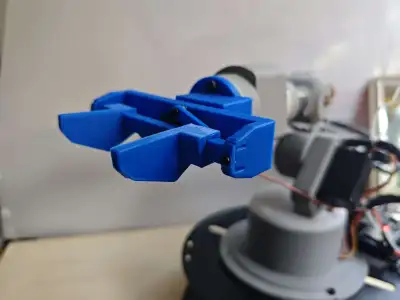
DIY Maker-Friendly Accessory Specifically developed for small robotic arms and desktop robots, this gripper features standard servo wiring and is compatible with Arduino and other microcontroller boards for debugging. It can serve as an educational component in STEM courses or be repurposed into a compact desktop grasping device, offering hobbyists ample opportunities for customization and creative experimentation.
Originality of the Model
The author declares that this work is their personally original model
This model is licensed under the following terms:
Credit must be given to the creator
Models(1)
 机械臂末端执行器-夹爪.stlDesigner
机械臂末端执行器-夹爪.stlDesigner
732.70 KB

2026-05-30