






Assembly
Mobile
Mechanical
Robot
Track
Mechanical Structure
Chassis
Tracked chassis
Moving mechanism
Robot chassis

- 0.2 mm layer height, 3‑layer walls, 15% infill density

6-disc
PETG
Designer

7

2
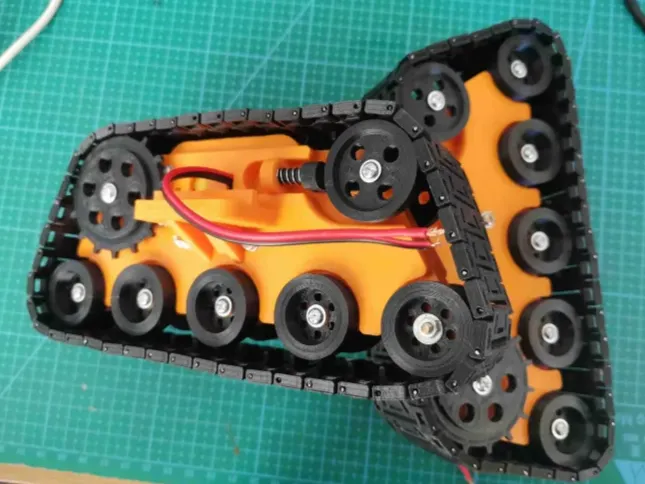
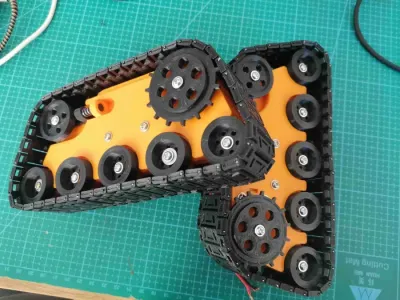
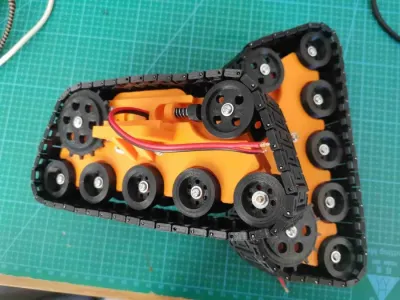
A trapezoidal track locomotion mechanism powered by TT motors requires printing 20 small wheels, which are securely fastened using M3×25 screws and nuts with washers. Additionally, four 7×20 springs with a wire diameter of 1 mm are needed for mounting the front wheel brackets, enabling the track plates to be kept taut. The track plates themselves are constructed by threading 1-mm iron wire through them; approximately 60 pieces are required on one side (though I’m not entirely sure of the exact number). The drive wheels can be mounted directly onto the TT motor shaft using M3×5 mm screws.
When purchasing TT motors, opt for coaxial models rather than those with split shafts, as the latter can cause misalignment and chain slippage in the drive wheels.






Bill of materials
- NameQuantityNotes
- 1螺丝20数量尺寸看详情
- 2弹簧4数量尺寸看详情
Originality of the Model
The author declares that this work is their personally original model
This model is licensed under the following terms:
This work is licensed under a Standard Digital File License. Digital files have a strict non-commercial, personal use only license.
You shall not share, sub-license, sell, rent, host, transfer, or distribute in any way the digital file or 3D printed versions of this object, nor any other derivative work of this object in its digital or physical format (including remixes of this object). You can not host these files on other digital platforms, web stores or cloud repositories. The objects may not be used in any way whatsoever in which you charge money, collect fees.
Models(1)
- 梯形履带模块履带底盘行走机构.3mfDesigner

3.73 MB

2026-05-05